








モータがないと
世界が回らない!?
モータ(電動機)の
種類・主な機能と用途
モータの種類
用途や仕様により、様々な種類があるモータ。代表的なモータを紹介します。

- 同期モータ
- 大容量領域で使用されます。
- 誘導モータ
- 汎用機械用に使用されます。
- リラクタンスモータ
- インバータ専用になりますが、IE5を実現できます。
- 永久磁石モータ
- インバータ専用になりますが、IE4を実現できます。
モータの基本構造
様々な部品から構成されるモータの主要備品を紹介します。

- 固定子鉄心(ステータコア)/
固定子巻線(ステータコイル) - 固定子鉄心にコイルが挿入されています。外部から供給された電気エネルギーがコイルに流れ、磁界が電気エネルギーを回転子に伝えます。
- 軸(シャフト)/
回転子鉄心(ロータコア) - 回転子鉄心に回転子導体(アルミを鋳込んだもの、もしくは銅バー)及び軸 ( シャフト)が挿入されています。固定子から受けた電気エネルギーを機械エネルギー(回転力)に変換します。回転力を軸により外部に伝え、負荷機械を動かします。
- 固定子枠(フレーム)
- フレーム内部に固定子と回転子が挿入され、これらを保持しています。
- 端子箱
- モータと外部の電源ケーブルの接続部(端子)を保護するための箱です。
- 軸受(ベアリング)
- 回転子を支える機械部品です。回転子を常に正しい位置で保つことで、モータの高速回転時でも安定して回転させることができます。
様々なモータの形状
モータには様々な形状があります。
これは工場やプラントの設置する環境に合わせ、各メーカーが最適な形状で設計している為です。
誤ったモータ形状を選んでしまうとランニングコストが増えたり、保守メンテナンスが困難になったりする為、
省コストや安全な操業をする上でも適切な形状を選ぶことは欠かせません。
代表的な形状
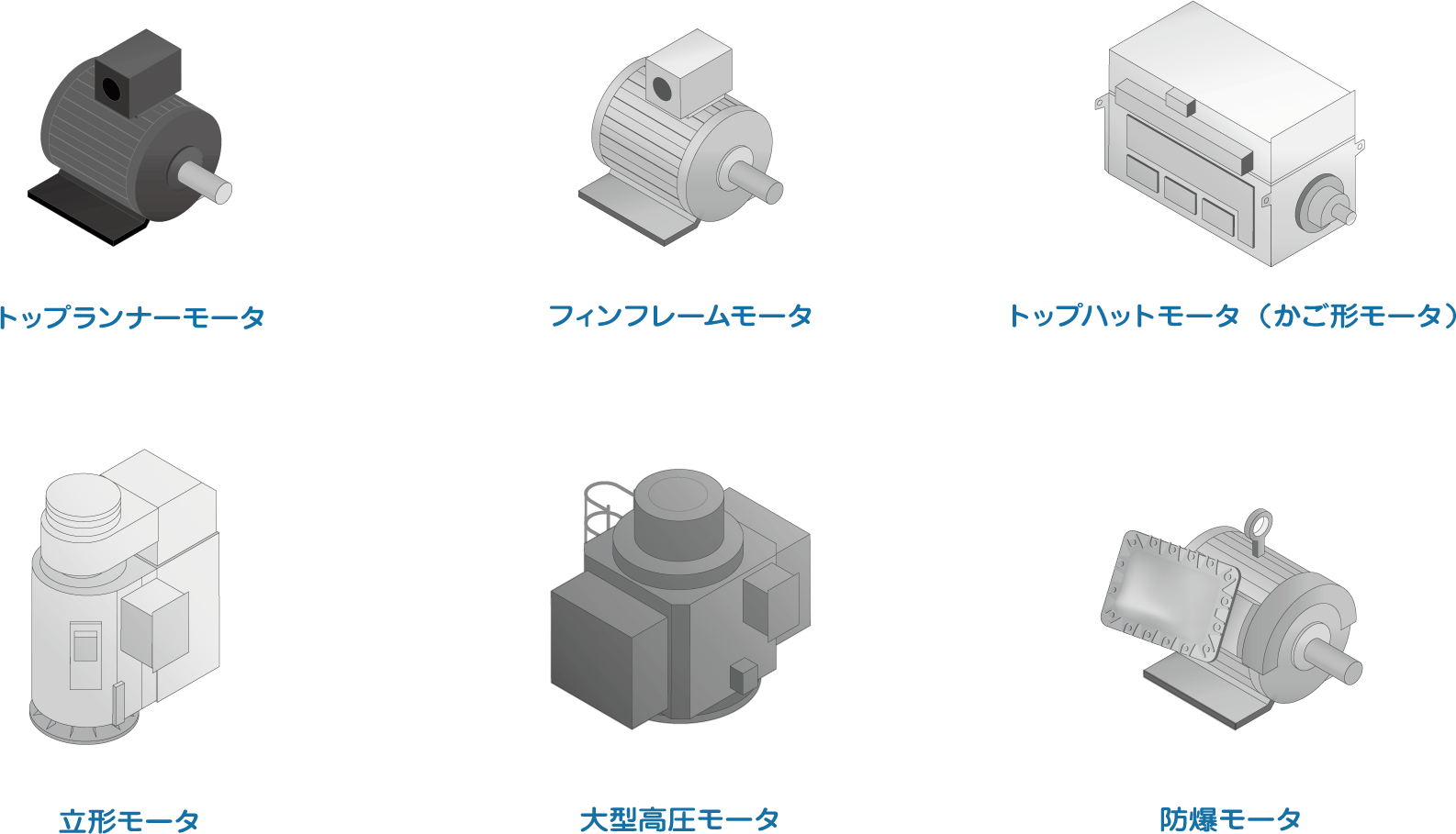
例えば以下のようなIP44の全閉外扇形、外被が箱のような形状で覆われているIP22の防滴保護形等、
形状を形作る外被には様々な形状があり、JEC規格(JEC-2110:2017)※3で人や物、水から保護する方式として定められています。


下記のようなモータは熱効率を高める為、外形をフィンのようなもので構造を形作っているモータのことをフィンフレームモータ。
外形が、かごのようなもので覆われているモータをトップハットモータまたはかご形モータと呼びます。
出力が大きいモータの多くは熱交換効率面でトップハット形が主流になっています。

モータの大きさ
モータの大きさは、「枠番号」で表記されます。「枠番号」はIEC規格(IEC60072-1)※4で寸法が決まっており、枠番の数字は、
据付面から軸心までの高さ(軸高、センターハイト:C)を表し、後に続く数字または英文字は、脚穴位置の前後幅(脚穴長:2F)を表しています。
例えば、枠番号が280Mの場合

※フィンフレームモータは、センターハイトCごとに決められたS, M, Lなどの記号に置き換えて表します。

枠番号は主にプラントや工場の設備設計や従来機との置き換えを検討する際に使用されます。
効率性
供給した電力エネルギーのうち、有効に使用された電力エネルギーが占める割合が高いほど効率性が良いとされています。必要な動力(出力)に対し、
効率のよいモータを使用すれば電力(入力)も小さくて済む為、適切なモータを選定することで省エネ効果が期待できます。
一般的な汎用機械用の誘導モータ(75~1000kWクラス)の効率は、、約94 ~ 96%くらいが多いとされ、
出力が小さなモータの効率は低く、出力が大きなモータの効率はかなり高い傾向となります。
また、モータは電力を動力に変換するというエネルギー特性上、一部が熱になって逃げる性質をもっています。この損失(発生損失)を
最小限に留めることがモータを取り巻く大きな課題でした。損失を最小限に留めるには、発生要因別に最適に制御することが重要です。
発生損失の種類

- 銅 損
- 一次銅損(固定子巻線)/二次銅損(回転子バー)
に発生する抵抗損 - 鉄 損
- 一次鉄損(固定子鉄心)/二次鉄損(回転子鉄心)
/ヒステリシス損。主に固定子鉄心に発生する損失 - 機械損
- 軸受の摩擦損/ファンの風損。
軸受やファン等の回転子に発生する摩擦損 - 漂遊負荷損
- 上記3つに含まれない、分類困難な損失。
高調波による鉄損、渦電流損など
効率については、各国で省エネを目的とした高効率規制があり、様々な取組みがなされています。
海外の高効率規制の動向
海外では、国ごとに効率認証制度の取得義務や罰則等が制定されています。IE5の規制は2021年現在のところありませんが、CIGRE WD47調査レポートによると、IE5効率の量産化は2030年、規制化は2038年と予測されております。

日本では2015年4月から省エネ法改正に伴う、トップランナーモータ規制が開始されており、
定められた基準に基いたモータ製品の開発・供給が進んでいます。
トップランナーモータ制度って何?

省エネの観点から日本国内におけるエネルギー消費量を抑えるために、市場に存在するエネルギー効率が最も優れた製品(これをトップランナーと表現)の値をベースとして、今後想定される技術進歩の度合を効率改善分として加えて基準値とする方式です。
これまで自動車、エアコン、変圧器(トランス)といった製品に対して施行されてきましたが、2015年4月からモータについても「エネルギーの使用の合理化等に関する法律(省エネ法)」により、モータの高効率化を義務付けるトップランナー制度が開始されました。
しかし、全てのモータが対象ではなく、規格JIS C 4034-30「回転電気機械-第30部:単一速度三相かご形誘導モータの効率クラス(IE※5コード)で規定される適用範囲に基づいた条件を満たすものが対象となっています。
IEコード図
効率をIE1 ~IE5でクラス分けしたもので規格JIS C 4034-30 / IEC60034-30で規定されています。

回転速度
モータを回す速さ(回転速度)はモータの極数(ポール(P)数とも言う)と電源の周波数を元に決定されます。

TMEICのファン・ポンプ用途誘導モータの平均で毎分3,000回転します。
圧縮機用で使用される超高速モータでは、周波数を上げることで毎分15,000回転を実現しています。
回転速度と極数、電源周波数の関係
50Hzは1秒間に50回、60Hzは60回、電気的なサイクル(交流)が繰り返されており、電源周波数が高ければ高いほど、モータの回転速度は速くなります。

モータの極数
極数というのはモータの固定子に作られる磁極(N極, S極)の数です。磁極は必ずN極とS極の2つで1対(一組)になる仕組みがあり、磁極が1対あれば2極機(2Pole, 2ポール)、2対あれば4極機(4Pole, 4ポール)のモータ構成となります。
モータの極数は用途によって違いもあります。
※ファン、ポンプ用途はほとんどが4Pか6P。コンプレッサ用途は2P。ミル、クラッシャ用途は6P以上が主流となっています。


モータへの電力供給方法
電力の供給方法には単相と三相があります。家電等、比較的小さい電気機器に電力を供給する場合に採用されるのが単相。
産業用機器のような大容量の電力を消費する電気機器に電力を供給する際に採用されるのが三相方式です。
工場やプラントの多くは大容量の交流電源を使用している為、殆どは三相モータです。
しかし、用途によっては単相電源仕様が必要なケースもある為、製品名称に三相が表記されています。


三相は3つの位相が短い間隔で次々と最大電圧に達する為、同方向への安定的な回転性が得られることができます。
その為、電気損失が単相と比較すると少なくて済む特徴があります。
負荷機との接続方法
モータで動かしたい工場やプラントの設備や機器のことを負荷機と呼びます。
モータが生み出す動力を他の機械に伝える方式には以下のようなものがあります。


- 直結駆動(カップリング直結)
- モータの軸と負荷機械をカップリングと呼ばれる部品に直接結合する方式。工場の多くはこの方式を採用しています。
- ギヤ駆動
- (ギヤ直結)ギヤ(歯車)を噛み合わせる結合方式。直結方式と異なりギヤ比を変えることで減速、増速が可能です。
- ベルト駆動
- モータの軸と負荷機械の軸にプーリと呼ばれる滑車をつけ、プーリにベルトを張ってトルクを伝える結合方式。負荷機の回転速度を自由に変えられます。
インバータ駆動を採用できないケースで負荷機をモータと異なる回転速度で動かしたい時に採用されることが多いです。 - 直動駆動
- 主に負荷機がファンのときに、モータの軸に直接、ファンのインペラ(羽根車)が付く方式。インペラの重量がモータ軸にかかるので注意が必要です。
様々な据付方式
用途や設置場所により、モータの形は横形と立形の2種に分類されます。


横形機では予めボルトを締めるための穴が空いている脚が付いており、
立形機では軸が下向き(立形軸下)になり重心も高くなる為、不安定にならないように
フランジ面でしっかり固定するフランジ取付方法が一般的です。
その他に、負荷機械及び使用する状態(仕様)によって様々な据付方式があります。
各種据付方式図

- ※3 JEC(Japanese Electrotechnical Committee)は、JIS(Japanese Industrial Standards):日本標準規格制定以前の
日本鉱工業品規格のこと。 - ※4 IEC(International Electrotechnical Commission):国際電気標準会議。
ISOで取り扱いがない電気・電子技術分野の国際規格の策定に取組む国際標準化機関 - ※5 IE:International Energy-efficiency Class の略語